AUTOSAR 入门教程之基础篇一
AUTOSAR(AUTomotive Open System Architecture)是一个开源的分层软件开发标准,适用于汽车电子控制单元(ECU)等,但不仅限于此。AUTOSAR 为软件提供了分层的自上而下的结构,并定义了软件组件之间的关系。
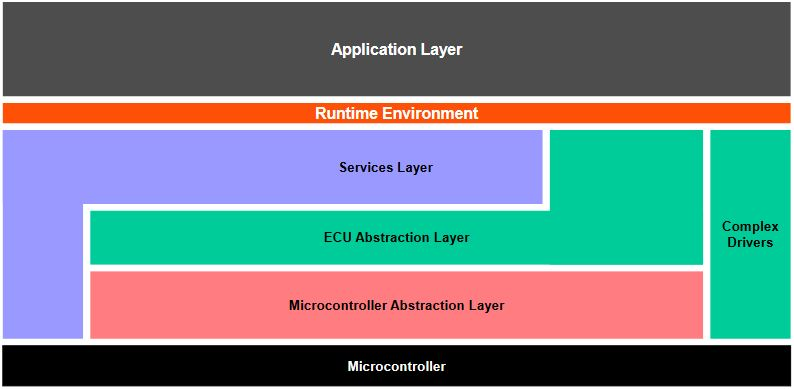
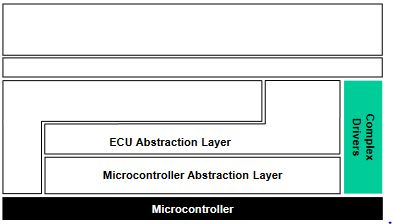
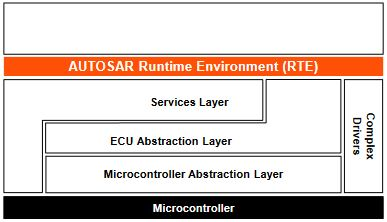
AUTOSAR 的分层架构可以分为基础软件(BSW)、运行时环境(RTE)和应用/软件组件层(SWC)。
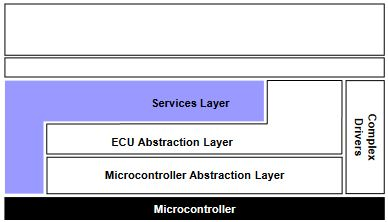
基础软件层可以进一步细分为微控制器抽象层(MCAL)、ECU 抽象层、服务层和复杂设备驱动(CDD)层。
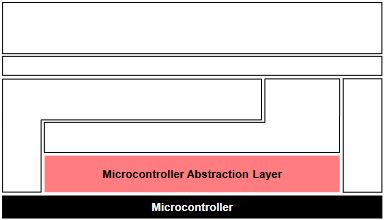
微控制器抽象层(MCAL)是分层 AUTOSAR 架构中的最低层,它直接与硬件通信。其基本职责是使上层独立于硬件。它包含微控制器的低级驱动程序。
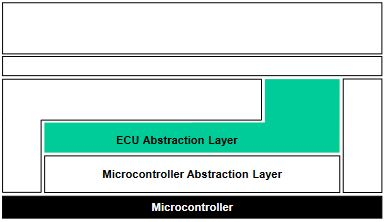
ECU 抽象层位于 MCAL 层之上,它包含 ECU 上微控制器外部的硬件组件的接口组件和驱动程序。其基本职责是使上层独立于 ECU 上可用的硬件。其下层接口依赖于硬件,而上层接口是硬件无关的。
服务层位于 ECU 抽象层之上,基本上独立于硬件,负责向应用程序提供基础的 BSW 功能。
运行时环境是分隔基础软件和应用软件的层。它上面的软件架构变成了组件级别,而不是基础软件中的分层架构。RTE 是虚拟功能总线(VFB)在 ECU 层面的实例化。RTE 是特定于 ECU 的。没有 BSW 的应用软件组件通过虚拟功能总线(VFB)相互通信。
复杂设备驱动(CDD)是一个层,应用程序软件组件可以通过运行时环境(RTE)直接访问硬件,而无需通过 AUTOSAR 的各个层。这个层被那些具有高时间限制的应用程序和 AUTOSAR 未描述的需求所使用。这个层是微控制器和 ECU 硬件相关的。